Travel Adventure Robot
The project is called "Travel Adventure Robot", which simulates an "expedition" scenario, requiring the robot to traverse through dangers, find the "treasure" correctly and return to the camp before the end of the "vacation". The project ultimately won the second prize in the China Robotics Competition.
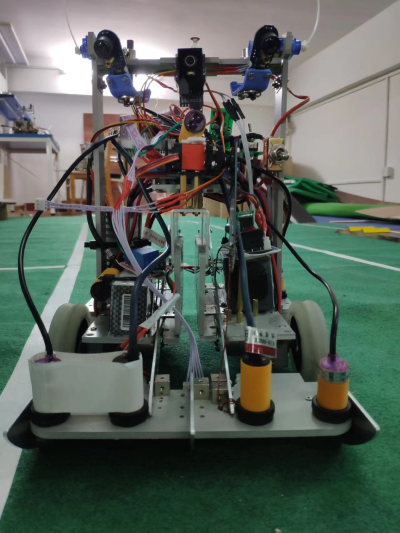
To ensure the accuracy of tracking, we utilized grayscale sensors to identify white lines to achieve the most basic tracing function and laser sensors to inform the robot of road situations in terms of hardware. Simultaneously, we utilized a camera to further improve the accuracy and realize the function of scanning QR code. There are also several other sensors such as color marker sensors, Hall encoders and photoelectric sensors to play auxiliary roles. On the software side, we predominantly applied PID algorithms to ensure that the robot moves at a fixed speed, reducing the impact of external factors on the robot's speed.
In terms of testing, team members applied segmented debugging to improve programming efficiency.
(Due to the confidentiality agreement, our code cannot be made public, if you want to know the code, please get in touch with me.)